


















MKS SERVO42D NEMA17 FOC Stepper Motor
Couldn't load pickup availability
Use this text to encourage communication or promote sharing on social networks.
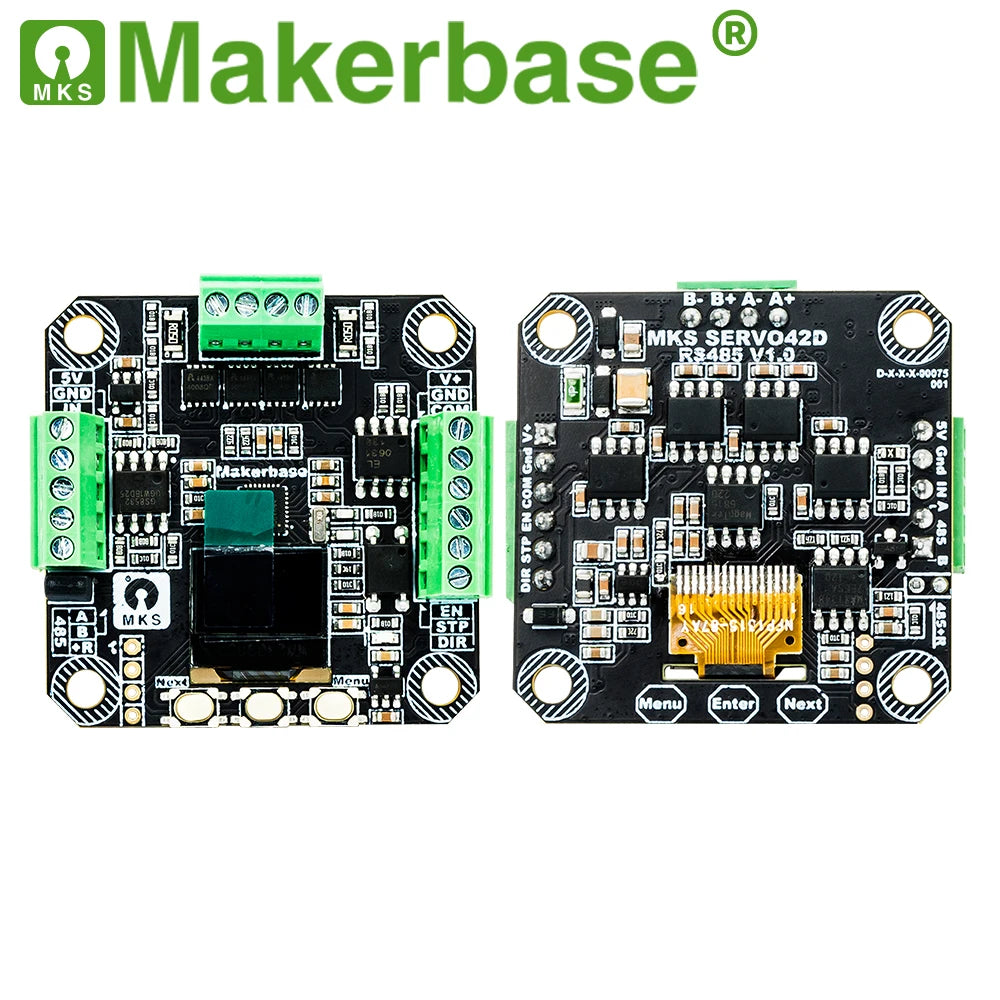
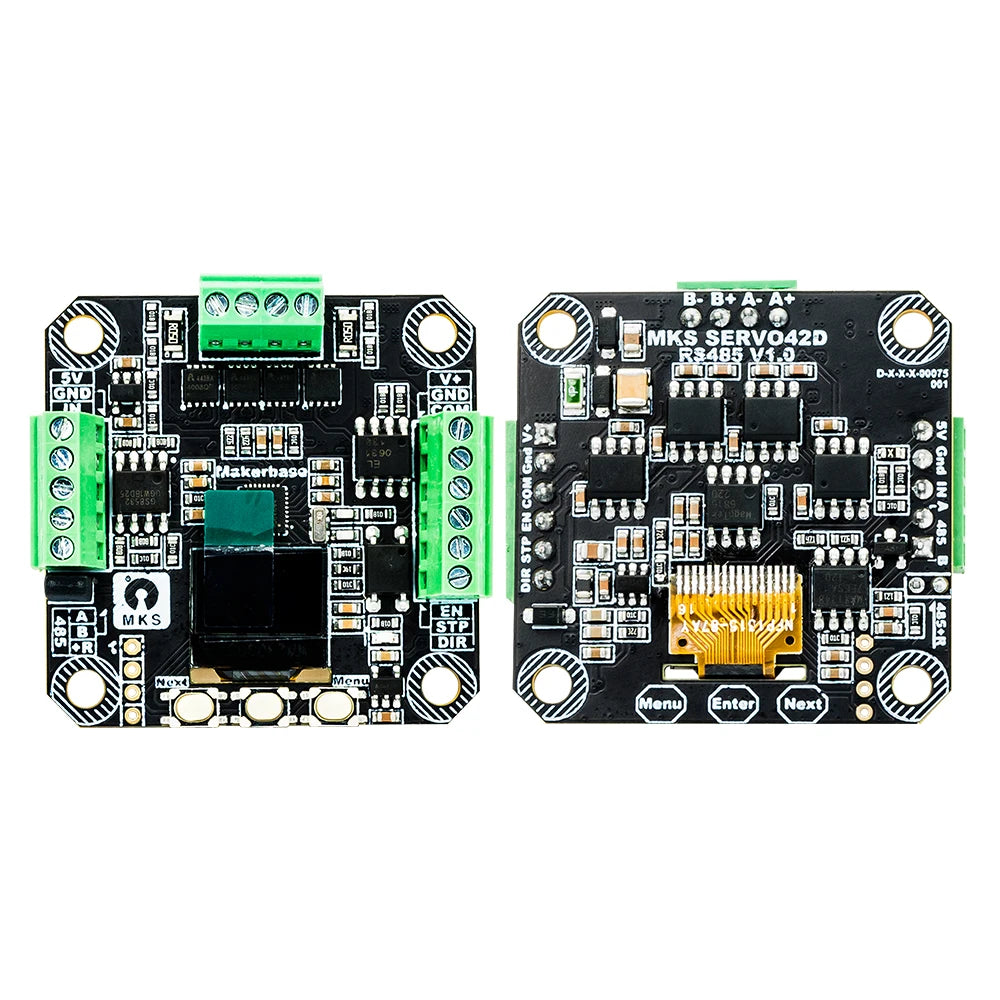
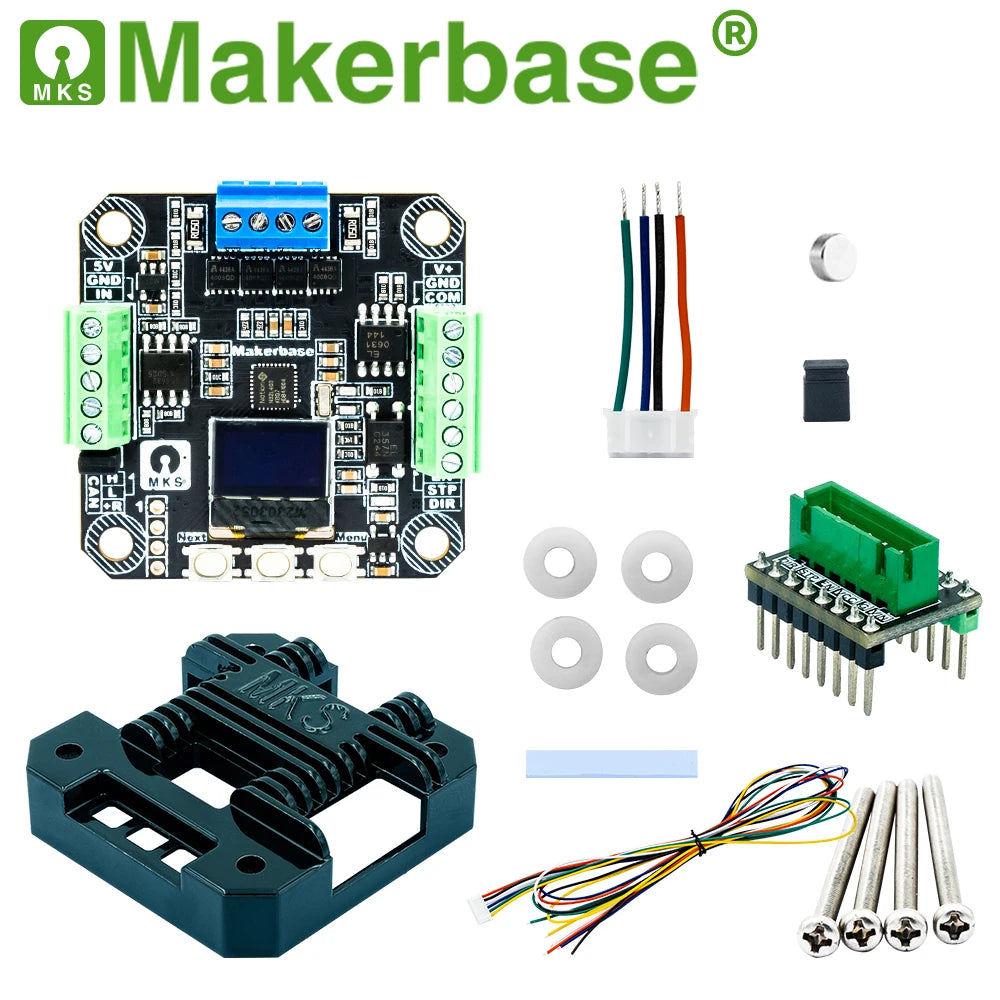
Makerbase MKS SERVO42D NEMA17 closed loop stepper motor driver CNC 3d printer for Gen_L FOC quiet and efficient
1.Support 6 working modes: pulse interface (open loop, closed loop, Foc mode), serial interface (open loop, closed loop, Foc mode);
2.Support CAN/RS485 interface;
3. Support MODBUS-RTU communication protocol;
4. Support curve acceleration and deceleration;
5. Support limit switch to return to zero;
6. Support speed mode, relative position and absolute position control mode
7. Support 1~256 arbitrary subdivision, support arbitrary working current setting;
8. The maximum input pulse frequency is 160KHz, and the maximum speed is 3000RPM,
9.Support multiple motor synchronous working modes;
10. Aluminum alloy shell.
USER MANUAL:
https://github.com/makerbase-motor/MKS-SERVO57D/tree/master/User%20Manual
Schematic:
https://github.com/makerbase-motor/MKS-SERVO57D/tree/master/Hardware
Features
1. Support 6 working modes: pulse interface (open loop, closed loop, Foc mode), serial interface (open loop, closedloop, Foc mode);
2. Support CAN/RS485 interface;
3. Support MODBUS-RTU communication protocol;
4. Support curve acceleration and deceleration;
5. Support limit switch to return to zero;
6. Support speed mode, relative position and absolute position control mode
7. Support 1~256 arbitrary subdivision, support arbitrary working current setting;
8. The maximum input pulse frequency is 160KHz, and the maximum speed is 3000RPM,
9.Support multiple motor synchronous working modes;
10. Aluminum alloy shell.





Product parameter
| Parameter | ||
|---|---|---|
| Board type | MKS SERVO42D_RS485 | MKS SERVO42D_CAN |
| Microprocessor | N32L403(Cortex-M4) | |
| MOSFET | AP4008QD(40V;20A) | |
| Encoder | 14bit magnetic encoder | |
| Working voltage | 12V-24V | |
| Working current | 0-3000mA | |
| The frequency ofupdate | Torque 20KHz Velocity 20KHz Position 20KHz |
|
| Maximum Speed | 3000RPM+ | |
| Subdivision | 1~256 (default 16) | |
| Motor vibration | Low | |
| Motor noise | Low | |
| Motor temperature | Low | |
| Pulse Signal Common |
Positive | |
| Pulse Signal Frequency |
Max 160KHZ | |
| Interface transceiver |
MAX13487E | TJA1051T |
| Interface rate | 9600/19200/…/115200/256000 | 125K/250K/500K |
| Interface Address | 1 broadcast address, 255 slave addresses | 1 broadcast address,2047 slave addresses |





